{kind=link}
Att urskilja nedgrävda föremål i sand, grus och jord är svårt för en robot. Det behövs fingrar som är smala nog för att tränga in i sand, rörliga nog för att leta runt och känsliga nog för att urskilja detaljerade former. Forskare har dock gjort det möjligt genom att skapa Digger Finger.
Det är Forskare vid Massachusetts Institute of Technology (M...
Unikt robotfinger hittar känsliga kablar i marken
2
Bilder

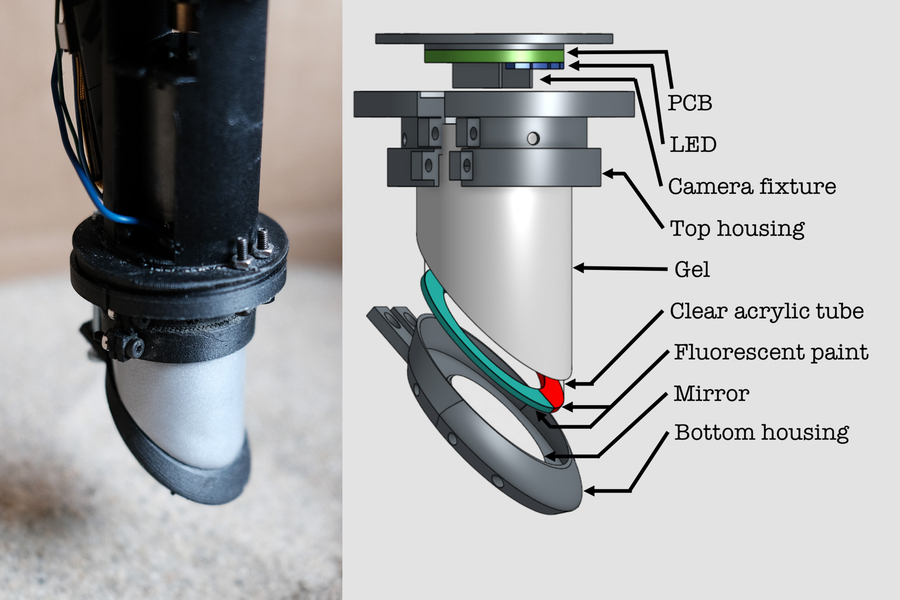
Roboten ska utföra underjordiska uppgifter som att exempelvis hitta nedgrävda kablar och andra känsliga föremål, exempelvis vid underhålls- och analysarbeten. Foto: MIT
Vill du få åtkomst till allt?
Prova 30 dagar för 0 kr.
Inga bindningstider eller kortuppgifter krävs.
Prova nu
Köp en prenumeration
Utforska våra prenumerationslösningar och välj den som passar dina behov.
Välj din prenumeration